


Estimation and Reconstruction of Continuum Soft Manipulators
- Category: Research
- Advisor: Prof. Prashant G. Mehta, Department of Mechanical Science and Engineering, UIUC
- Project date: September 2019 - Present
- Project Link: Energy Based Reconstruction
Project Goal
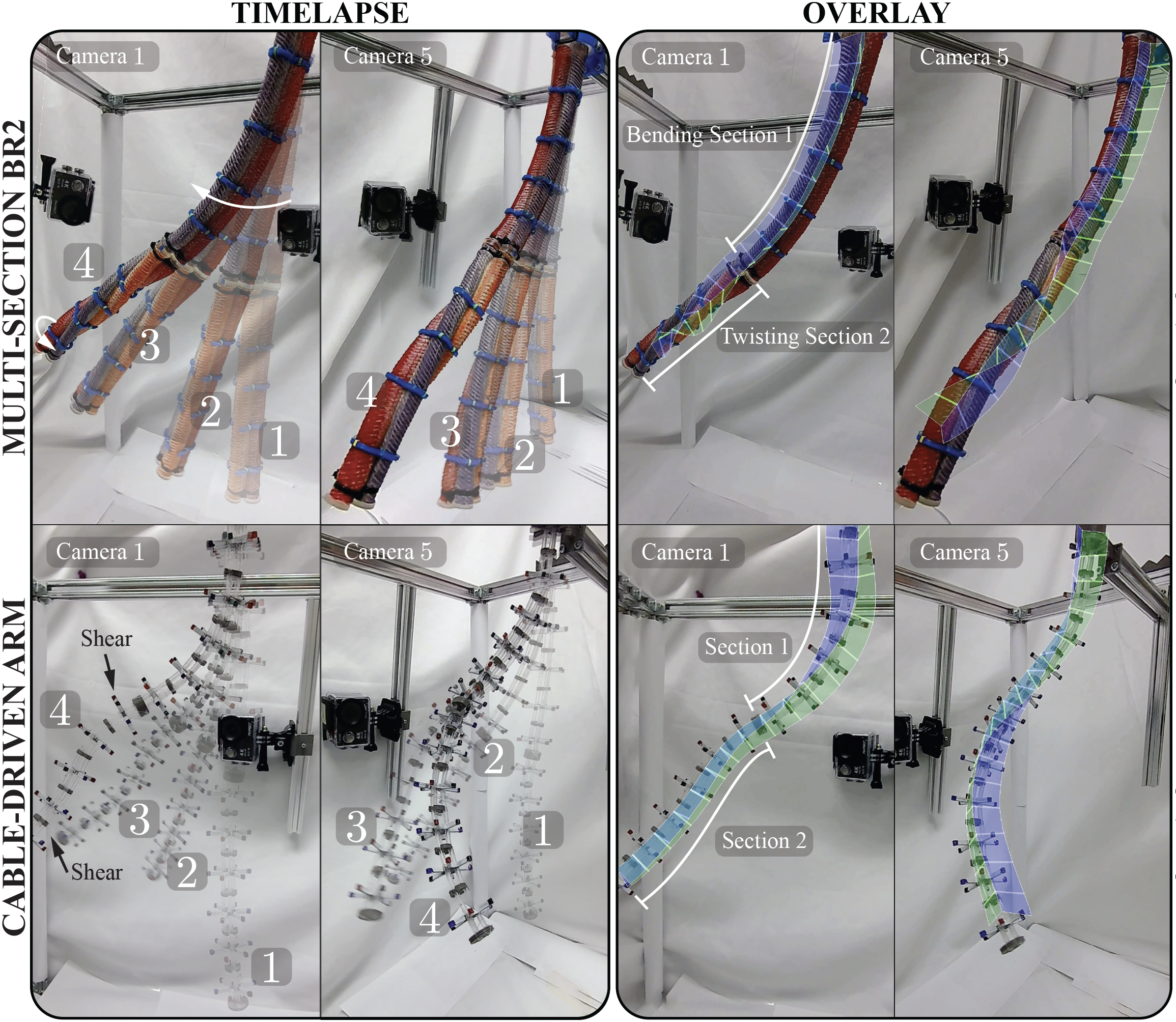
Reconstruct soft manipulators in a simulator from camera recordings by utilizing a Cosserat rod model-based estimation method with data information from a limited number of sensors along the actuator. Employ an innovative and iterative algorithm and reach a reconstruction precision of less than 2.8% error.