


Energy Shaping Control on Continuum Soft Manipulators
- Category: Research
- Advisor: Prof. Prashant G. Mehta, Department of Mechanical Science and Engineering, UIUC
- Project date: September 2019 - Present
- Project Link: Energy Shaping Control
Project Goal
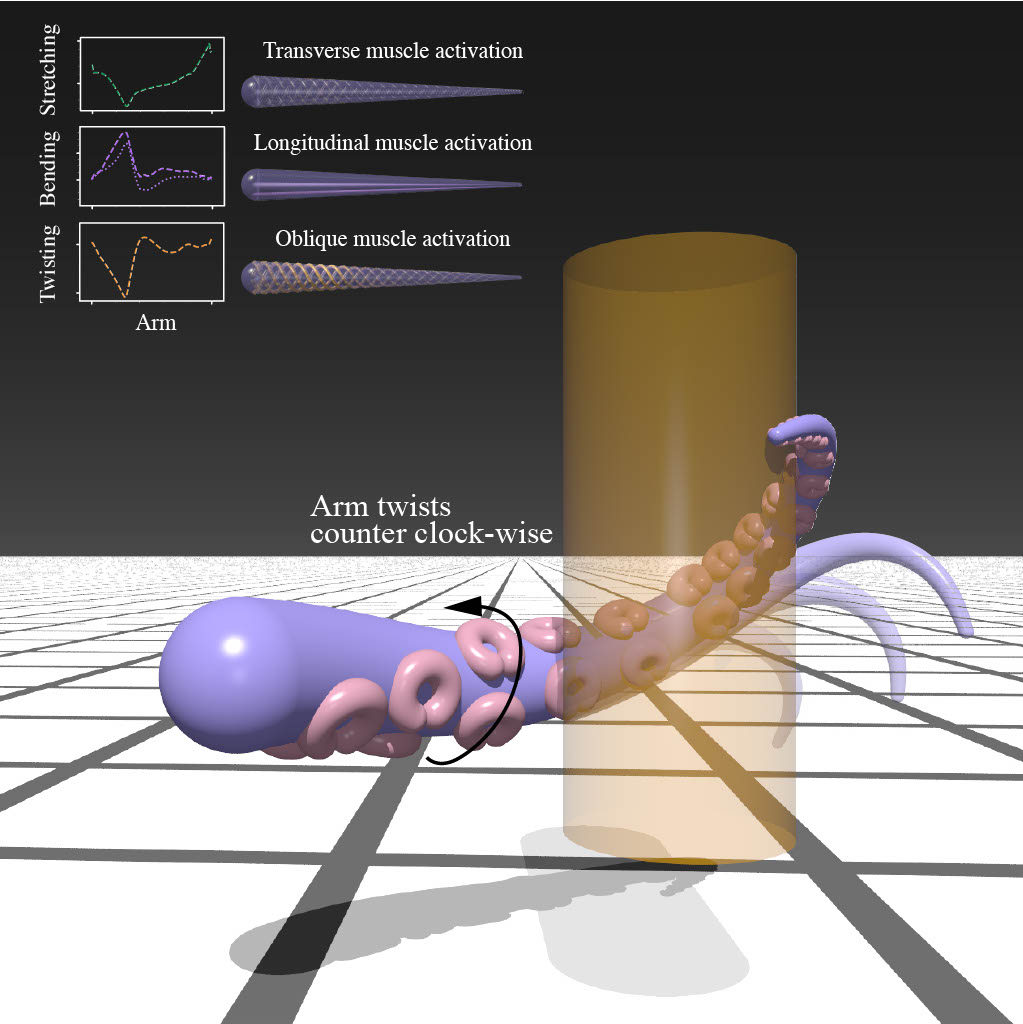
Collaborate with multidisciplinary researchers, including those in the fields of neuroscience, robotics, and manufacturing, to develop models and control algorithms for soft and slender actuators.Implement an energy-based control algorithm on simulated elastic arms, such as octopus arms, or physical soft actuators, such as artificial muscles, to perform various manipulations, including reaching and grasping.